


Note
Click here to download the full example code
训练一个马里奥游戏的 RL Agent¶
Authors: Yuansong Feng, Suraj Subramanian, Howard Wang, Steven Guo.
This tutorial walks you through the fundamentals of Deep Reinforcement Learning. At the end, you will implement an AI-powered Mario (using Double Deep Q-Networks) that can play the game by itself.
Although no prior knowledge of RL is necessary for this tutorial, you can familiarize yourself with these RL concepts, and have this handy cheatsheet as your companion. The full code is available here.
%%bash
pip install gym-super-mario-bros==7.4.0
pip install tensordict==0.3.0
pip install torchrl==0.3.0
import torch
from torch import nn
from torchvision import transforms as T
from PIL import Image
import numpy as np
from pathlib import Path
from collections import deque
import random, datetime, os
# Gym is an OpenAI toolkit for RL
import gym
from gym.spaces import Box
from gym.wrappers import FrameStack
# NES Emulator for OpenAI Gym
from nes_py.wrappers import JoypadSpace
# Super Mario environment for OpenAI Gym
import gym_super_mario_bros
from tensordict import TensorDict
from torchrl.data import TensorDictReplayBuffer, LazyMemmapStorage
RL Definitions¶
Environment The world that an agent interacts with and learns from.
Action \(a\) : How the Agent responds to the Environment. The set of all possible Actions is called action-space.
State \(s\) : The current characteristic of the Environment. The set of all possible States the Environment can be in is called state-space.
Reward \(r\) : Reward is the key feedback from Environment to Agent. It is what drives the Agent to learn and to change its future action. An aggregation of rewards over multiple time steps is called Return.
Optimal Action-Value function \(Q^*(s,a)\) : Gives the expected return if you start in state \(s\), take an arbitrary action \(a\), and then for each future time step take the action that maximizes returns. \(Q\) can be said to stand for the “quality” of the action in a state. We try to approximate this function.
Environment¶
Initialize Environment¶
In Mario, the environment consists of tubes, mushrooms and other components.
When Mario makes an action, the environment responds with the changed (next) state, reward and other info.
# Initialize Super Mario environment (in v0.26 change render mode to 'human' to see results on the screen)
if gym.__version__ < '0.26':
env = gym_super_mario_bros.make("SuperMarioBros-1-1-v0", new_step_api=True)
else:
env = gym_super_mario_bros.make("SuperMarioBros-1-1-v0", render_mode='rgb', apply_api_compatibility=True)
# Limit the action-space to
# 0. walk right
# 1. jump right
env = JoypadSpace(env, [["right"], ["right", "A"]])
env.reset()
next_state, reward, done, trunc, info = env.step(action=0)
print(f"{next_state.shape},\n {reward},\n {done},\n {info}")
Preprocess Environment¶
Environment data is returned to the agent in next_state. As you saw
above, each state is represented by a [3, 240, 256] size array.
Often that is more information than our agent needs; for instance,
Mario’s actions do not depend on the color of the pipes or the sky!
We use Wrappers to preprocess environment data before sending it to the agent.
GrayScaleObservation is a common wrapper to transform an RGB image
to grayscale; doing so reduces the size of the state representation
without losing useful information. Now the size of each state:
[1, 240, 256]
ResizeObservation downsamples each observation into a square image.
New size: [1, 84, 84]
SkipFrame is a custom wrapper that inherits from gym.Wrapper and
implements the step() function. Because consecutive frames don’t
vary much, we can skip n-intermediate frames without losing much
information. The n-th frame aggregates rewards accumulated over each
skipped frame.
FrameStack is a wrapper that allows us to squash consecutive frames
of the environment into a single observation point to feed to our
learning model. This way, we can identify if Mario was landing or
jumping based on the direction of his movement in the previous several
frames.
class SkipFrame(gym.Wrapper):
def __init__(self, env, skip):
"""Return only every `skip`-th frame"""
super().__init__(env)
self._skip = skip
def step(self, action):
"""Repeat action, and sum reward"""
total_reward = 0.0
for i in range(self._skip):
# Accumulate reward and repeat the same action
obs, reward, done, trunk, info = self.env.step(action)
total_reward += reward
if done:
break
return obs, total_reward, done, trunk, info
class GrayScaleObservation(gym.ObservationWrapper):
def __init__(self, env):
super().__init__(env)
obs_shape = self.observation_space.shape[:2]
self.observation_space = Box(low=0, high=255, shape=obs_shape, dtype=np.uint8)
def permute_orientation(self, observation):
# permute [H, W, C] array to [C, H, W] tensor
observation = np.transpose(observation, (2, 0, 1))
observation = torch.tensor(observation.copy(), dtype=torch.float)
return observation
def observation(self, observation):
observation = self.permute_orientation(observation)
transform = T.Grayscale()
observation = transform(observation)
return observation
class ResizeObservation(gym.ObservationWrapper):
def __init__(self, env, shape):
super().__init__(env)
if isinstance(shape, int):
self.shape = (shape, shape)
else:
self.shape = tuple(shape)
obs_shape = self.shape + self.observation_space.shape[2:]
self.observation_space = Box(low=0, high=255, shape=obs_shape, dtype=np.uint8)
def observation(self, observation):
transforms = T.Compose(
[T.Resize(self.shape, antialias=True), T.Normalize(0, 255)]
)
observation = transforms(observation).squeeze(0)
return observation
# Apply Wrappers to environment
env = SkipFrame(env, skip=4)
env = GrayScaleObservation(env)
env = ResizeObservation(env, shape=84)
if gym.__version__ < '0.26':
env = FrameStack(env, num_stack=4, new_step_api=True)
else:
env = FrameStack(env, num_stack=4)
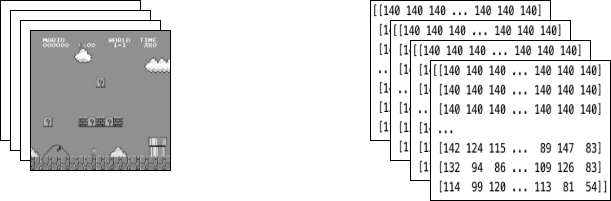
After applying the above wrappers to the environment, the final wrapped
state consists of 4 gray-scaled consecutive frames stacked together, as
shown above in the image on the left. Each time Mario makes an action,
the environment responds with a state of this structure. The structure
is represented by a 3-D array of size [4, 84, 84].
Agent¶
We create a class Mario to represent our agent in the game. Mario
should be able to:
Act according to the optimal action policy based on the current state (of the environment).
Remember experiences. Experience = (current state, current action, reward, next state). Mario caches and later recalls his experiences to update his action policy.
Learn a better action policy over time
class Mario:
def __init__():
pass
def act(self, state):
"""Given a state, choose an epsilon-greedy action"""
pass
def cache(self, experience):
"""Add the experience to memory"""
pass
def recall(self):
"""Sample experiences from memory"""
pass
def learn(self):
"""Update online action value (Q) function with a batch of experiences"""
pass
In the following sections, we will populate Mario’s parameters and define his functions.
Act¶
For any given state, an agent can choose to do the most optimal action (exploit) or a random action (explore).
Mario randomly explores with a chance of self.exploration_rate; when
he chooses to exploit, he relies on MarioNet (implemented in
Learn section) to provide the most optimal action.
class Mario:
def __init__(self, state_dim, action_dim, save_dir):
self.state_dim = state_dim
self.action_dim = action_dim
self.save_dir = save_dir
self.device = "cuda" if torch.cuda.is_available() else "cpu"
# Mario's DNN to predict the most optimal action - we implement this in the Learn section
self.net = MarioNet(self.state_dim, self.action_dim).float()
self.net = self.net.to(device=self.device)
self.exploration_rate = 1
self.exploration_rate_decay = 0.99999975
self.exploration_rate_min = 0.1
self.curr_step = 0
self.save_every = 5e5 # no. of experiences between saving Mario Net
def act(self, state):
"""
Given a state, choose an epsilon-greedy action and update value of step.
Inputs:
state(``LazyFrame``): A single observation of the current state, dimension is (state_dim)
Outputs:
``action_idx`` (``int``): An integer representing which action Mario will perform
"""
# EXPLORE
if np.random.rand() < self.exploration_rate:
action_idx = np.random.randint(self.action_dim)
# EXPLOIT
else:
state = state[0].__array__() if isinstance(state, tuple) else state.__array__()
state = torch.tensor(state, device=self.device).unsqueeze(0)
action_values = self.net(state, model="online")
action_idx = torch.argmax(action_values, axis=1).item()
# decrease exploration_rate
self.exploration_rate *= self.exploration_rate_decay
self.exploration_rate = max(self.exploration_rate_min, self.exploration_rate)
# increment step
self.curr_step += 1
return action_idx
Cache and Recall¶
These two functions serve as Mario’s “memory” process.
cache(): Each time Mario performs an action, he stores the
experience to his memory. His experience includes the current
state, action performed, reward from the action, the next state,
and whether the game is done.
recall(): Mario randomly samples a batch of experiences from his
memory, and uses that to learn the game.
class Mario(Mario): # subclassing for continuity
def __init__(self, state_dim, action_dim, save_dir):
super().__init__(state_dim, action_dim, save_dir)
self.memory = TensorDictReplayBuffer(storage=LazyMemmapStorage(100000, device=torch.device("cpu")))
self.batch_size = 32
def cache(self, state, next_state, action, reward, done):
"""
Store the experience to self.memory (replay buffer)
Inputs:
state (``LazyFrame``),
next_state (``LazyFrame``),
action (``int``),
reward (``float``),
done(``bool``))
"""
def first_if_tuple(x):
return x[0] if isinstance(x, tuple) else x
state = first_if_tuple(state).__array__()
next_state = first_if_tuple(next_state).__array__()
state = torch.tensor(state)
next_state = torch.tensor(next_state)
action = torch.tensor([action])
reward = torch.tensor([reward])
done = torch.tensor([done])
# self.memory.append((state, next_state, action, reward, done,))
self.memory.add(TensorDict({"state": state, "next_state": next_state, "action": action, "reward": reward, "done": done}, batch_size=[]))
def recall(self):
"""
Retrieve a batch of experiences from memory
"""
batch = self.memory.sample(self.batch_size).to(self.device)
state, next_state, action, reward, done = (batch.get(key) for key in ("state", "next_state", "action", "reward", "done"))
return state, next_state, action.squeeze(), reward.squeeze(), done.squeeze()
Learn¶
Mario uses the DDQN algorithm under the hood. DDQN uses two ConvNets - \(Q_{online}\) and \(Q_{target}\) - that independently approximate the optimal action-value function.
In our implementation, we share feature generator features across
\(Q_{online}\) and \(Q_{target}\), but maintain separate FC
classifiers for each. \(\theta_{target}\) (the parameters of
\(Q_{target}\)) is frozen to prevent updating by backprop. Instead,
it is periodically synced with \(\theta_{online}\) (more on this
later).
Neural Network¶
class MarioNet(nn.Module):
"""mini CNN structure
input -> (conv2d + relu) x 3 -> flatten -> (dense + relu) x 2 -> output
"""
def __init__(self, input_dim, output_dim):
super().__init__()
c, h, w = input_dim
if h != 84:
raise ValueError(f"Expecting input height: 84, got: {h}")
if w != 84:
raise ValueError(f"Expecting input width: 84, got: {w}")
self.online = self.__build_cnn(c, output_dim)
self.target = self.__build_cnn(c, output_dim)
self.target.load_state_dict(self.online.state_dict())
# Q_target parameters are frozen.
for p in self.target.parameters():
p.requires_grad = False
def forward(self, input, model):
if model == "online":
return self.online(input)
elif model == "target":
return self.target(input)
def __build_cnn(self, c, output_dim):
return nn.Sequential(
nn.Conv2d(in_channels=c, out_channels=32, kernel_size=8, stride=4),
nn.ReLU(),
nn.Conv2d(in_channels=32, out_channels=64, kernel_size=4, stride=2),
nn.ReLU(),
nn.Conv2d(in_channels=64, out_channels=64, kernel_size=3, stride=1),
nn.ReLU(),
nn.Flatten(),
nn.Linear(3136, 512),
nn.ReLU(),
nn.Linear(512, output_dim),
)
TD Estimate & TD Target¶
Two values are involved in learning:
TD Estimate - the predicted optimal \(Q^*\) for a given state \(s\)
TD Target - aggregation of current reward and the estimated \(Q^*\) in the next state \(s'\)
Because we don’t know what next action \(a'\) will be, we use the action \(a'\) maximizes \(Q_{online}\) in the next state \(s'\).
Notice we use the
@torch.no_grad()
decorator on td_target() to disable gradient calculations here
(because we don’t need to backpropagate on \(\theta_{target}\)).
class Mario(Mario):
def __init__(self, state_dim, action_dim, save_dir):
super().__init__(state_dim, action_dim, save_dir)
self.gamma = 0.9
def td_estimate(self, state, action):
current_Q = self.net(state, model="online")[
np.arange(0, self.batch_size), action
] # Q_online(s,a)
return current_Q
@torch.no_grad()
def td_target(self, reward, next_state, done):
next_state_Q = self.net(next_state, model="online")
best_action = torch.argmax(next_state_Q, axis=1)
next_Q = self.net(next_state, model="target")[
np.arange(0, self.batch_size), best_action
]
return (reward + (1 - done.float()) * self.gamma * next_Q).float()
Updating the model¶
As Mario samples inputs from his replay buffer, we compute \(TD_t\)
and \(TD_e\) and backpropagate this loss down \(Q_{online}\) to
update its parameters \(\theta_{online}\) (\(\alpha\) is the
learning rate lr passed to the optimizer)
\(\theta_{target}\) does not update through backpropagation. Instead, we periodically copy \(\theta_{online}\) to \(\theta_{target}\)
class Mario(Mario):
def __init__(self, state_dim, action_dim, save_dir):
super().__init__(state_dim, action_dim, save_dir)
self.optimizer = torch.optim.Adam(self.net.parameters(), lr=0.00025)
self.loss_fn = torch.nn.SmoothL1Loss()
def update_Q_online(self, td_estimate, td_target):
loss = self.loss_fn(td_estimate, td_target)
self.optimizer.zero_grad()
loss.backward()
self.optimizer.step()
return loss.item()
def sync_Q_target(self):
self.net.target.load_state_dict(self.net.online.state_dict())
Save checkpoint¶
class Mario(Mario):
def save(self):
save_path = (
self.save_dir / f"mario_net_{int(self.curr_step // self.save_every)}.chkpt"
)
torch.save(
dict(model=self.net.state_dict(), exploration_rate=self.exploration_rate),
save_path,
)
print(f"MarioNet saved to {save_path} at step {self.curr_step}")
Putting it all together¶
class Mario(Mario):
def __init__(self, state_dim, action_dim, save_dir):
super().__init__(state_dim, action_dim, save_dir)
self.burnin = 1e4 # min. experiences before training
self.learn_every = 3 # no. of experiences between updates to Q_online
self.sync_every = 1e4 # no. of experiences between Q_target & Q_online sync
def learn(self):
if self.curr_step % self.sync_every == 0:
self.sync_Q_target()
if self.curr_step % self.save_every == 0:
self.save()
if self.curr_step < self.burnin:
return None, None
if self.curr_step % self.learn_every != 0:
return None, None
# Sample from memory
state, next_state, action, reward, done = self.recall()
# Get TD Estimate
td_est = self.td_estimate(state, action)
# Get TD Target
td_tgt = self.td_target(reward, next_state, done)
# Backpropagate loss through Q_online
loss = self.update_Q_online(td_est, td_tgt)
return (td_est.mean().item(), loss)
Logging¶
import numpy as np
import time, datetime
import matplotlib.pyplot as plt
class MetricLogger:
def __init__(self, save_dir):
self.save_log = save_dir / "log"
with open(self.save_log, "w") as f:
f.write(
f"{'Episode':>8}{'Step':>8}{'Epsilon':>10}{'MeanReward':>15}"
f"{'MeanLength':>15}{'MeanLoss':>15}{'MeanQValue':>15}"
f"{'TimeDelta':>15}{'Time':>20}\n"
)
self.ep_rewards_plot = save_dir / "reward_plot.jpg"
self.ep_lengths_plot = save_dir / "length_plot.jpg"
self.ep_avg_losses_plot = save_dir / "loss_plot.jpg"
self.ep_avg_qs_plot = save_dir / "q_plot.jpg"
# History metrics
self.ep_rewards = []
self.ep_lengths = []
self.ep_avg_losses = []
self.ep_avg_qs = []
# Moving averages, added for every call to record()
self.moving_avg_ep_rewards = []
self.moving_avg_ep_lengths = []
self.moving_avg_ep_avg_losses = []
self.moving_avg_ep_avg_qs = []
# Current episode metric
self.init_episode()
# Timing
self.record_time = time.time()
def log_step(self, reward, loss, q):
self.curr_ep_reward += reward
self.curr_ep_length += 1
if loss:
self.curr_ep_loss += loss
self.curr_ep_q += q
self.curr_ep_loss_length += 1
def log_episode(self):
"Mark end of episode"
self.ep_rewards.append(self.curr_ep_reward)
self.ep_lengths.append(self.curr_ep_length)
if self.curr_ep_loss_length == 0:
ep_avg_loss = 0
ep_avg_q = 0
else:
ep_avg_loss = np.round(self.curr_ep_loss / self.curr_ep_loss_length, 5)
ep_avg_q = np.round(self.curr_ep_q / self.curr_ep_loss_length, 5)
self.ep_avg_losses.append(ep_avg_loss)
self.ep_avg_qs.append(ep_avg_q)
self.init_episode()
def init_episode(self):
self.curr_ep_reward = 0.0
self.curr_ep_length = 0
self.curr_ep_loss = 0.0
self.curr_ep_q = 0.0
self.curr_ep_loss_length = 0
def record(self, episode, epsilon, step):
mean_ep_reward = np.round(np.mean(self.ep_rewards[-100:]), 3)
mean_ep_length = np.round(np.mean(self.ep_lengths[-100:]), 3)
mean_ep_loss = np.round(np.mean(self.ep_avg_losses[-100:]), 3)
mean_ep_q = np.round(np.mean(self.ep_avg_qs[-100:]), 3)
self.moving_avg_ep_rewards.append(mean_ep_reward)
self.moving_avg_ep_lengths.append(mean_ep_length)
self.moving_avg_ep_avg_losses.append(mean_ep_loss)
self.moving_avg_ep_avg_qs.append(mean_ep_q)
last_record_time = self.record_time
self.record_time = time.time()
time_since_last_record = np.round(self.record_time - last_record_time, 3)
print(
f"Episode {episode} - "
f"Step {step} - "
f"Epsilon {epsilon} - "
f"Mean Reward {mean_ep_reward} - "
f"Mean Length {mean_ep_length} - "
f"Mean Loss {mean_ep_loss} - "
f"Mean Q Value {mean_ep_q} - "
f"Time Delta {time_since_last_record} - "
f"Time {datetime.datetime.now().strftime('%Y-%m-%dT%H:%M:%S')}"
)
with open(self.save_log, "a") as f:
f.write(
f"{episode:8d}{step:8d}{epsilon:10.3f}"
f"{mean_ep_reward:15.3f}{mean_ep_length:15.3f}{mean_ep_loss:15.3f}{mean_ep_q:15.3f}"
f"{time_since_last_record:15.3f}"
f"{datetime.datetime.now().strftime('%Y-%m-%dT%H:%M:%S'):>20}\n"
)
for metric in ["ep_lengths", "ep_avg_losses", "ep_avg_qs", "ep_rewards"]:
plt.clf()
plt.plot(getattr(self, f"moving_avg_{metric}"), label=f"moving_avg_{metric}")
plt.legend()
plt.savefig(getattr(self, f"{metric}_plot"))
Let’s play!¶
In this example we run the training loop for 40 episodes, but for Mario to truly learn the ways of his world, we suggest running the loop for at least 40,000 episodes!
use_cuda = torch.cuda.is_available()
print(f"Using CUDA: {use_cuda}")
print()
save_dir = Path("checkpoints") / datetime.datetime.now().strftime("%Y-%m-%dT%H-%M-%S")
save_dir.mkdir(parents=True)
mario = Mario(state_dim=(4, 84, 84), action_dim=env.action_space.n, save_dir=save_dir)
logger = MetricLogger(save_dir)
episodes = 40
for e in range(episodes):
state = env.reset()
# Play the game!
while True:
# Run agent on the state
action = mario.act(state)
# Agent performs action
next_state, reward, done, trunc, info = env.step(action)
# Remember
mario.cache(state, next_state, action, reward, done)
# Learn
q, loss = mario.learn()
# Logging
logger.log_step(reward, loss, q)
# Update state
state = next_state
# Check if end of game
if done or info["flag_get"]:
break
logger.log_episode()
if (e % 20 == 0) or (e == episodes - 1):
logger.record(episode=e, epsilon=mario.exploration_rate, step=mario.curr_step)
Conclusion¶
In this tutorial, we saw how we can use PyTorch to train a game-playing AI. You can use the same methods to train an AI to play any of the games at the OpenAI gym. Hope you enjoyed this tutorial, feel free to reach us at our github!
Total running time of the script: ( 0 minutes 0.000 seconds)
