


开始使用 DeviceMesh¶
作者: Iris Zhang, Wanchao Liang
Note
 在 github 上查看和编辑本教程。
在 github 上查看和编辑本教程。
先决条件:
Python 3.8 - 3.11
PyTorch 2.2
为分布式训练设置分布式通信器(例如 NVIDIA 集体通信库 (NCCL) 通信器)可能是一个重大挑战。
对于需要组合不同并行性的工作负载,用户需要为每个并行性解决方案手动设置和管理 NCCL 通信器(例如,ProcessGroup)。
这个过程可能很复杂且容易出错。DeviceMesh 可以简化这个过程,使其更易于管理和减少错误。
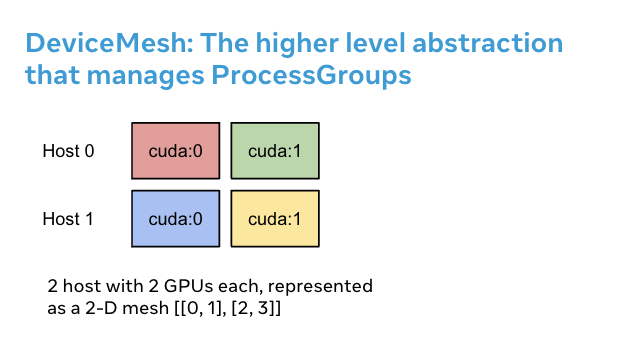
什么是 DeviceMesh¶
DeviceMesh 是一个管理 ProcessGroup 的高级抽象。它允许用户轻松创建节点间和节点内进程组,
而无需担心如何为不同的子进程组正确设置等级。
用户还可以通过 DeviceMesh 轻松管理多维并行性的底层进程组/设备。
为什么 DeviceMesh 有用¶
当处理多维并行性(例如 3-D 并行)时,DeviceMesh 非常有用,因为这种情况需要并行性组合。 例如,当您的并行性解决方案需要跨主机和每个主机内部进行通信时。上图显示,我们可以创建一个 2D 网格, 连接每个主机内的设备,并在同构设置中将每个设备与其他主机上的对应设备连接起来。
如果没有 DeviceMesh,用户在应用任何并行性之前需要手动设置每个进程上的 NCCL 通信器和 CUDA 设备,这可能相当复杂。
以下代码片段说明了如何在没有 DeviceMesh 的情况下设置混合分片 2-D 并行模式。
首先,我们需要手动计算分片组和复制组。然后,我们需要为每个等级分配正确的分片和复制组。
import os
import torch
import torch.distributed as dist
# 了解世界拓扑
rank = int(os.environ["RANK"])
world_size = int(os.environ["WORLD_SIZE"])
print(f"在 {rank=} 上运行示例,世界大小为 {world_size=}")
# 创建进程组以管理 2-D 类似的并行模式
dist.init_process_group("nccl")
torch.cuda.set_device(rank)
# 创建分片组(例如 (0, 1, 2, 3), (4, 5, 6, 7))
# 并为每个等级分配正确的分片组
num_node_devices = torch.cuda.device_count()
shard_rank_lists = list(range(0, num_node_devices // 2)), list(range(num_node_devices // 2, num_node_devices))
shard_groups = (
dist.new_group(shard_rank_lists[0]),
dist.new_group(shard_rank_lists[1]),
)
current_shard_group = (
shard_groups[0] if rank in shard_rank_lists[0] else shard_groups[1]
)
# 创建复制组(例如,(0, 4), (1, 5), (2, 6), (3, 7))
# 并为每个等级分配正确的复制组
current_replicate_group = None
shard_factor = len(shard_rank_lists[0])
for i in range(num_node_devices // 2):
replicate_group_ranks = list(range(i, num_node_devices, shard_factor))
replicate_group = dist.new_group(replicate_group_ranks)
if rank in replicate_group_ranks:
current_replicate_group = replicate_group
要运行上面的代码片段,我们可以利用 PyTorch Elastic。让我们创建一个名为 2d_setup.py 的文件。
然后,运行以下 torch elastic/torchrun 命令。
torchrun --nproc_per_node=8 --rdzv_id=100 --rdzv_endpoint=localhost:29400 2d_setup.py
Note
为了简化演示,我们仅使用一个节点模拟 2D 并行。请注意,此代码片段也可用于多主机设置。
借助 init_device_mesh(),我们可以仅用两行代码完成上述 2D 设置,并且如果需要,
我们仍然可以访问底层的 ProcessGroup。
from torch.distributed.device_mesh import init_device_mesh
mesh_2d = init_device_mesh("cuda", (2, 4), mesh_dim_names=("replicate", "shard"))
# 用户可以通过 `get_group` API 访问底层进程组。
replicate_group = mesh_2d.get_group(mesh_dim="replicate")
shard_group = mesh_2d.get_group(mesh_dim="shard")
让我们创建一个名为 2d_setup_with_device_mesh.py 的文件。
然后,运行以下 torch elastic/torchrun 命令。
torchrun --nproc_per_node=8 2d_setup_with_device_mesh.py
如何将 DeviceMesh 与 HSDP 一起使用¶
混合分片数据并行(HSDP)是一种 2D 策略,在主机内执行 FSDP,在主机间执行 DDP。
让我们看一个示例,说明 DeviceMesh 如何帮助将 HSDP 应用到您的模型,使用简单的设置。使用 DeviceMesh, 用户无需手动创建和管理分片组和复制组。
import torch
import torch.nn as nn
from torch.distributed.device_mesh import init_device_mesh
from torch.distributed.fsdp import FullyShardedDataParallel as FSDP, ShardingStrategy
class ToyModel(nn.Module):
def __init__(self):
super(ToyModel, self).__init__()
self.net1 = nn.Linear(10, 10)
self.relu = nn.ReLU()
self.net2 = nn.Linear(10, 5)
def forward(self, x):
return self.net2(self.relu(self.net1(x)))
# HSDP: MeshShape(2, 4)
mesh_2d = init_device_mesh("cuda", (2, 4))
model = FSDP(
ToyModel(), device_mesh=mesh_2d, sharding_strategy=ShardingStrategy.HYBRID_SHARD
)
让我们创建一个名为 hsdp.py 的文件。
然后,运行以下 torch elastic/torchrun 命令。
torchrun --nproc_per_node=8 hsdp.py
